蓝桥杯嵌入式外设开发记录 - PWM输出 & 输入捕获
本文记录了学习蓝桥杯嵌入式开发过程中的PWM输出&输入捕获的记录
蓝桥杯嵌入式外设开发记录 - PWM输出 & 输入捕获
蓝桥杯嵌入式外设开发记录 - PWM输出 & 输入捕获
基本信息
| 项目 | 内容 |
|---|---|
| 开发板型号 | CT117E (STM32G431RBT6) |
| 开发环境 | STM32CubeMX 6.6.1, Keil uVision5 MDK 5.38 |
| 记录日期 | 2025-03-04 |
1. PWM波的输出
1.1 CubeMX 配置
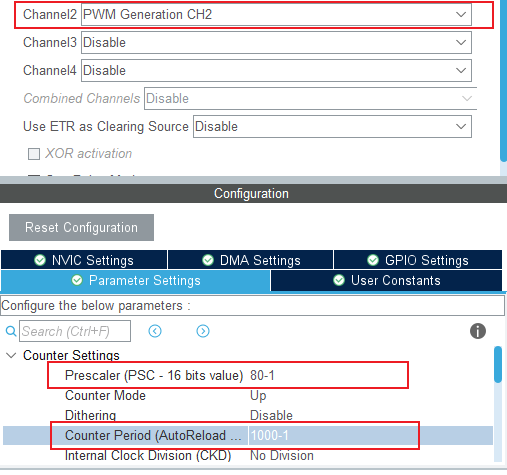
PWM频率计算公式:
\(f = \frac{f_{\text{system}}}{(ARR + 1)(PSC + 1)}\) PWM周期计算公式: \(T = \frac{1}{f} = \frac{(ARR + 1)(PSC + 1)}{f_{\text{system}}}\) 占空比计算公式: \(\text{DutyCycle} = \frac{CCR}{ARR + 1}\)
1.2 初始化代码
启动PWM波:
以下代码用于启动定时器2的通道2的PWM输出。
1
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2);
修改占空比:
以下代码直接修改定时器2的CCR2寄存器值,从而改变PWM的占空比。
1
TIM2->CCR2 = 500;
2. 输入捕获
2.1 CubeMX 配置
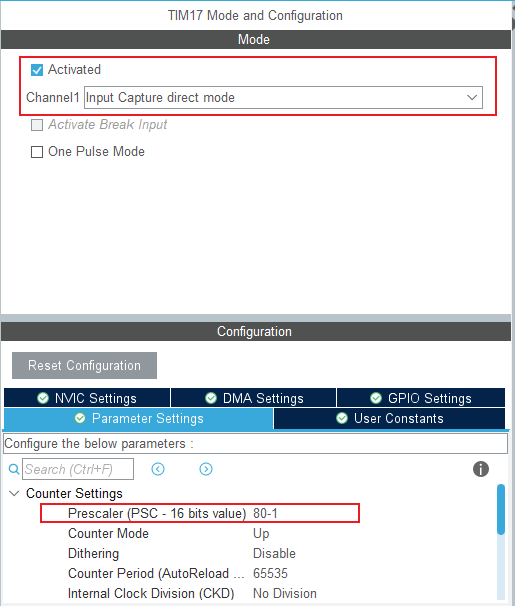
频率计算公式: \(f = \frac{f_{\text{sys}}}{(PSC + 1) \times \text{capture\_value}}\)
2.2 初始化代码
启动输入捕获中断:
以下代码用于启动定时器17的通道1的输入捕获,并使能中断。
1
HAL_TIM_IC_Start_IT(&htim17, TIM_CHANNEL_1);
输入捕获中断回调函数:
以下代码展示了输入捕获中断回调函数 HAL_TIM_IC_CaptureCallback 的实现。该函数在每次捕获事件发生时被调用。
1
2
3
4
5
6
7
8
9
uint32_t Fre, capture_value;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIM17) {
capture_value = htim->Instance->CCR1;
TIM17->CNT = 0; // 重置计数器
Fre = 1000000 / capture_value; // 计算频率
}
}
2.3 捕获NE555信号发生器信号
输入捕获中断回调函数示例 (针对TIM2和TIM16):
以下代码展示了如何针对不同的定时器(TIM2 和 TIM16)编写输入捕获中断回调函数。注意,此处的频率计算公式 TIMx_Fre = 80000000/(80*TIMx_capture_value) 依赖于特定的预分频系数和系统时钟频率。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIM2) {
TIM2_capture_value = TIM2->CCR1;
TIM2->CNT = 0;
TIM2_Fre = 80000000 / (80 * TIM2_capture_value);
HAL_TIM_IC_Start(&htim2, TIM_CHANNEL_1);
}
if (htim->Instance == TIM16) {
TIM16_capture_value = TIM16->CCR1;
TIM16->CNT = 0;
TIM16_Fre = 80000000 / (80 * TIM16_capture_value);
HAL_TIM_IC_Start(&htim16, TIM_CHANNEL_1);
}
}
2.4 测量占空比
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
// 输入捕获中断回调函数,当TIM的输入捕获事件触发时由HAL库调用
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
// 判断触发中断的定时器是否为TIM2
if(htim->Instance == TIM2)
{
// 判断触发中断的通道是否为通道1
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
// 获取通道1的捕获值(通常对应上升沿捕获)
TIM2_capture_value = TIM2->CCR1;
// 重置TIM2计数器,为下次测量做准备
TIM2->CNT = 0 ;
// 计算信号频率
TIM2_Fre = 1000000/TIM2_capture_value;
// 计算占空比:用下降沿值除以上升沿周期值,转换为百分比
duty = ((float)TIM2_capture_value_fall/(float)TIM2_capture_value)*100;
}
// 判断触发中断的通道是否为通道2
else if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
// 获取通道2的捕获值(通常对应下降沿捕获)
TIM2_capture_value_fall = TIM2->CCR2;
}
// 重新启动通道1和通道2的输入捕获(HAL库捕获后会自动停止通道)
HAL_TIM_IC_Start(&htim2,TIM_CHANNEL_1);
HAL_TIM_IC_Start(&htim2,TIM_CHANNEL_2);
}
}
本文由作者按照
CC BY 4.0
进行授权